Купить
Интересуюсь Dahua
Распродажа EOL-моделей Dahua
Оптовая цена
Стать партнёром и получить Партнёрский прайс-лист





Dahua побеждает в тесте по отслеживанию объектов GOT-10k
Компания Dahua Technology, известный во всем мире поставщик интеллектуальных видеорешений в сфере IoT и решений на основе алгоритмов искусственного интеллекта, получила еще одно подтверждение своего лидерства. Интеллектуальный визуальный трекер компании (Dahua Technology Visual Object Tracking Algorithm — DH-RPT) стал лучшим в тесте на отслеживание объектов Generic Object Tracking Benchmark (GOT-10k). В этом соревновании Dahua превзошла решения от многих других широко известных в отрасли компаний и академических исследовательских институтов. Новое решение смогло превзойти результаты лучшего на сегодняшний день алгоритма SOTA на наборах данных OTB2015, VOT2018 и VOT2019.
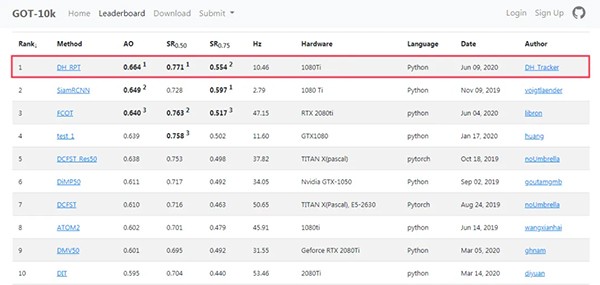
Результаты работы алгоритма DH-RPT, ставшего лучшим в тесте GOT-10k
О тесте GOT-10k
Тест GOT-10k представляет собой набор данных для отслеживания объектов, признанный международным сообществом экспертов. Он проводится и поддерживается центром интеллектуальных систем и инженерных исследований института автоматизации Китайской академии наук (CASIA). Обучающий набор состоит из 10 000 видеороликов, включающих в себя 563 целевые категории и 87 шаблонов движения. Тестовый набор состоит из 180 видеороликов с 84 целями и 32 режимами движения.
Целевые категории учебного и тестового наборов не пересекаются между собой. Для оценки алгоритма требуются унифицированные учебные данные. Ттест является чрезвычайно сложной задачей и в нем принимают участие самые известные профильные организации, как Китайские, так и зарубежные.
Алгоритм отслеживания объектов
Алгоритм имитирует способность человеческого глаза оценивать и отслеживать движение объекта. Он реагирует на положение и движение объекта на видеопотоке, адаптируется к изменению угла обзора IP-камеры, окружающей среды, появлению препятствий и прочим факторам. Алгоритм может применяться для анализа видео в системах безопасности, при организации интерфейса человека с машиной, в робототехнике, в автомобильных автопилотах и так далее.
Для точного отслеживания объектов в сложной среде команда Dahua RSIA приняла решение вместо ограничивающих прямоугольников использовать набор репрезентативных точек. Такой способ оценки состояния цели позволяет достичь более детальной локализации и точного моделирования внешнего вида объекта. В сочетании с стратегией многослойного агрегирования этот подход дает подробную структурную информацию о цели высокую степень дискриминации отвлекающих объектов.
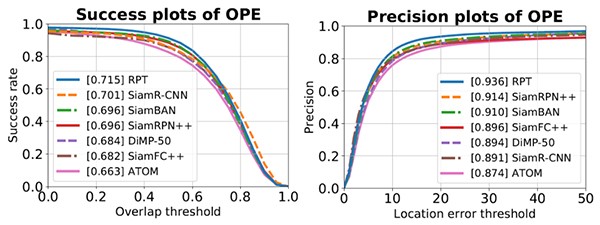
Результат сравнения алгоритмов на наборе данных OTB2015
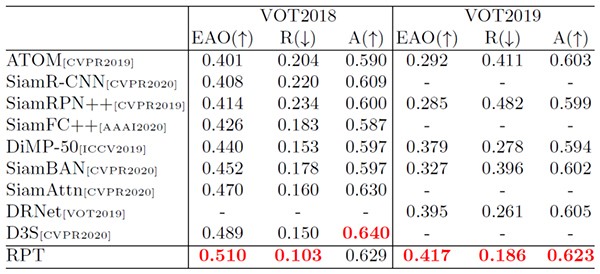
Результат сравнения алгоритмов на наборах данных VOT2018 и VOT2019
Применение алгоритма в продуктах Dahua

Автономное отслеживание в UAV

Автономное отслеживание в робототехнике